


Potenciál využitia robotiky v aditívnej výrobe Aditívna výroba (AV) je súbor procesov, ktoré vytvárajú 3D diely pridávaním materiálu, zvyčajne po vrstvách. V súčasnosti sa AV používa na vytváranie dielov v nano- až makrorozmere v širokej škále materiálov pre viaceré oblasti, ako je spotrebný tovar, letectvo, obrana, vesmírne technológie, stavebníctvo, lekárstvo a umelé tkanivá. Najnovšie trendy sa zameriavajú na použitie AV na vytváranie funkčne odstupňovaných a inteligentných štruktúr (napr. s tvarovou pamäťou alebo samoopravujúcich sa materiálov) a kombináciu AV s inými technikami prostredníctvom vývoja hybridných alebo multimodálnych výrobných systémov. V závislosti od mechanického systému používaného na ovládanie tlačového lôžka/tlačových hláv sa súčasťou AV stávajú najčastejšie portálové roboty, robotické ramená a mobilné roboty, ktorých použitie je v tejto oblasti novinkou.
Ako vidno v tab. 1, väčšina systémov pre AV je založená na pôvodnej koncepcii portálových platforiem z dôvodu vysokej presnosti polohovania koncového efektora a jednoduchosti ich kĺbovej štruktúry a riadiaceho systému. Portálové systémy však predstavujú obmedzený pracovný priestor a obmedzený pomer medzi pracovným priestorom a priestorom, ktorý zaberá stroj. V poslednom období bolo vyvinutých veľké množstvo systémov AV založených na využití robotických ramien, a to pre aplikácie vyžadujúce veľký pracovný priestor. Často ide o flexibilné systémy umožňujúce viacosovú tlač pomocou konfigurácie viacerých robotov s vysokým stupňom voľnosti. Kvôli štrukturálnej flexibilite sú však v týchto systémoch prítomné vibrácie, ktoré ovplyvňujú kvalitu a presnosť tlače.
| technológia aditívnej výroby | opis procesu | mechanický systém | ||
| portálový systém | robotické rameno | mobilné roboty | ||
| extrúzia materiálu | proces AV založený na vrstvení roztaveného alebo viskózneho materiálu cez dýzu | P | P | P |
| VAT foto-polymerizácia | proces AV, ktorý využíva svetlo vyžarované lampou alebo laserom na selektívne polymerizované (vytvrdzovacia reakcia) kvapalné fotopolymérne materiály | P | P | NP |
| laminovanie dosiek | proces AV, ktorý vytvára 3D objekty ukladaním tenkých vrstiev materiálu (napr. keramických pások potiahnutých papierom), ktoré sú orezané podľa požadovaného tvaru | P | P | NP |
| spekanie práškového lôžka | proces AV, ktorý využíva laser alebo elektrónový lúč na selektívne roztavenie postupných vrstiev práškových materiálov | P | NP | NP |
| priama depozícia energie | proces AV, v ktorom sa sústredená energia používa na roztavenie materiálov pri ich ukladaní | P | P | NP |
| nástrek materiálu | proces AV, ktorý vytvára 3D objekty vysielaním prúdu kvapiek stavebného materiálu na presné súradnice | P | NP | NP |
| nanášanie spojiva | proces AV, ktorý nanáša prúd mikročastíc spojivového materiálu na povrch práškového lôžka a spája častice tam, kde má byť objekt vytvorený | P | P | NP |
P – preskúmané, NP – nepreskúmané
Tab. 1
Novým trendom v AV je používanie mobilných robotov (pozemných alebo vzdušných), ktoré umožňujú vykonávať proces tlače na veľkom pracovnom priestore. Prenosnosť mobilných robotov umožňuje použitie AV na miestach, ktoré sú nebezpečné alebo ťažko dosiahnuteľné pre ľudí. Tieto systémy majú však určité obmedzenia, pokiaľ ide o presnosť polohovania tlačovej hlavy. Koncepcia tímov robotov spočíva v použití viacerých robotov, ktoré vykonávajú kolektívne úlohy a možno ich klasifikovať ako homogénne alebo heterogénne systémy. V homogénnych systémoch majú všetky roboty rovnaké schopnosti. Homogénne systémy sú tvorené vzájomne spolupracujúcimi (kooperatívnymi) tlačovými robotmi pracujúcimi spoločne na procese tlače tej istej časti.
Medzi heterogénne systémy patria asistenčné roboty, ktoré vykonávajú rôzne podporné úlohy, ako napríklad vyberanie a umiestňovanie dielov, aby pomohli robotu zodpovednému za proces tlače. Systémy s viacerými spolupracujúcimi robotmi prinášajú niekoľko výhod, ako je zníženie zložitosti úloh, zvýšenie výkonu, zvýšená spoľahlivosť a jednoduchosť návrhu systému. Úloha, ktorá je pre jeden robot zložitá vzhľadom na charakter úlohy alebo jeho vnútorné vlastností, môže byť rozdelená medzi viaceré roboty. Okrem toho rozdelenie úlohy medzi viaceré roboty pomáha zvyšovať výkon a skrátiť celkový čas potrebný na dokončenie úlohy.
Spoľahlivosť je výhodou aj pre kooperatívne roboty, pretože ak robot z akéhokoľvek dôvodu zlyhá, môžu ho nahradiť iné roboty v systéme bez toho, aby to ovplyvnilo dokončenie úlohy. Návrh viacerých menších robotov je jednoduchší a flexibilnejší ako návrh jedného veľkého systému, ktorý musí mať schopnosti všetkých ostatných robotov. Použitie tímu kooperatívnych robotov má potenciál výrazne transformovať AV, čo umožňuje vytvárať alebo opravovať veľké zložité diely vytvorené z rôznych materiálov v širokom spektre prostredí (in-site alebo off-site), čím sa zlepšuje všestrannosť, produktivita a efektívnosť.
Kooperatívne tlačové roboty
Kooperatívne tlačové portálové systémy
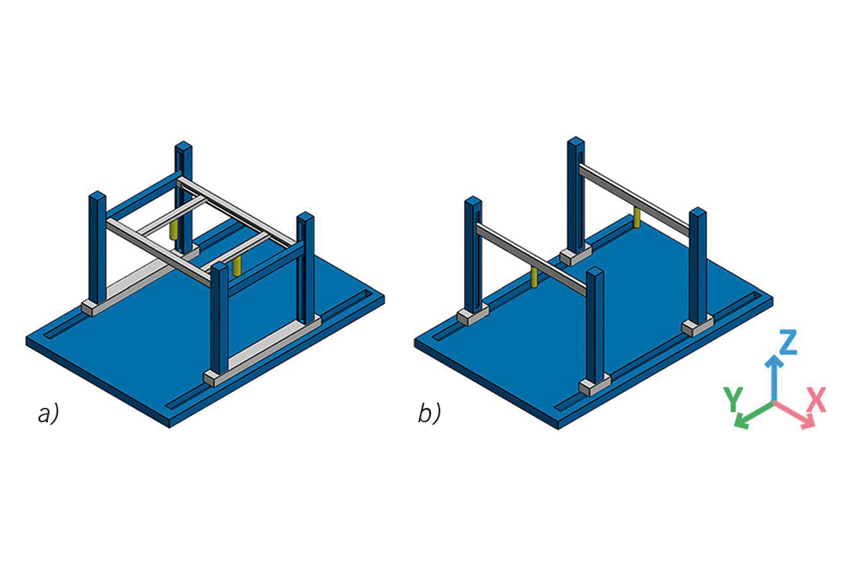
Kooperatívne portálové systémy zahŕňajú rôzne kinematické konfigurácie s inštalovanými viacerými dýzami (obr. 1a) a portálmi (obr. 1b). Portálové systémy s viacerými dýzami pozostávajú z jednej platformy, ktorá nesie viacero dýz. V tejto konfigurácii sa môže každá dýza voľne pohybovať na osi X aj Y nezávisle, ale os Z je zdieľaná medzi tlačovými hlavami. Na osi X sa dýzy nemôžu krížiť.
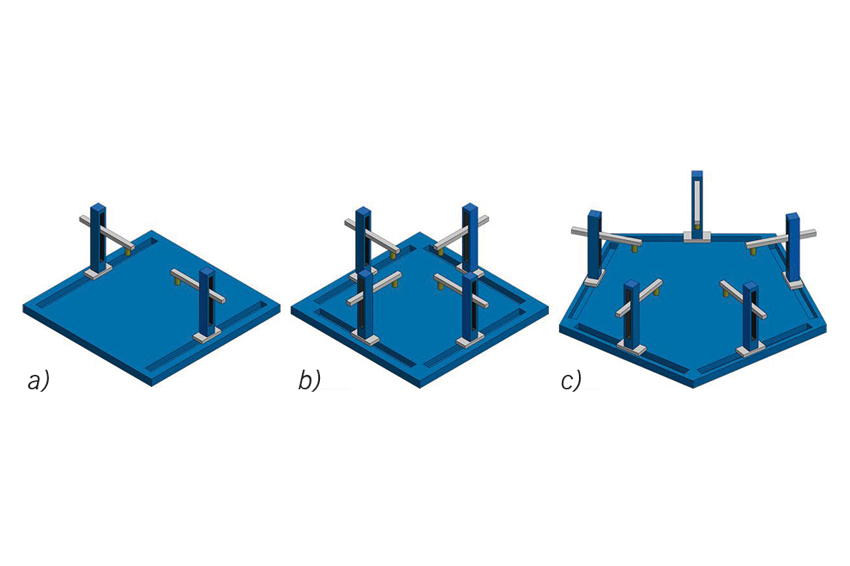
Viacportálové systémy obsahujú viacero portálov usporiadaných vedľa seba a každý portál riadi špecifickú tlačovú hlavu. V tejto konfigurácii nemôžu tlačové hlavy križovať iné tlačové hlavy v osi Y, pričom sa môžu voľne pohybovať v akomkoľvek inom smere. Lepším kinematickým systémom, aj keď zložitejším, je konfigurácia s viacramenným portálom (obr. 2). V tomto prípade sa kooperatívny systém môže voľne pohybovať vo všetkých smeroch, pričom môže prejsť cez iné dýzy, ak nehrozí kolízia.
Konfiguráciu s viacerými ramenami možno upraviť na ľubovoľný počet tlačových hláv. Na obr. 2 sú zobrazené tri viacramenné konfigurácie s rôznym počtom tlačových hláv. Systém s n počtom tlačových hláv vyžaduje, aby bola tlačová platforma tvarovaná ako mnohouholník s aspoň n stranami. Veľké stroje používané na AV veľkých dielov predstavujú obmedzenú presnosť a kvalitu, pokiaľ sa na nich majú vyrábať diely s malými rozmermi. Tento problém možno vyriešiť použitím viacerých portálov na výrobu veľkorozmerných dielov, čo umožňuje priradiť rôzne tlačové hlavy rôznym regiónom.
Kooperatívne tlačové robotické ramená
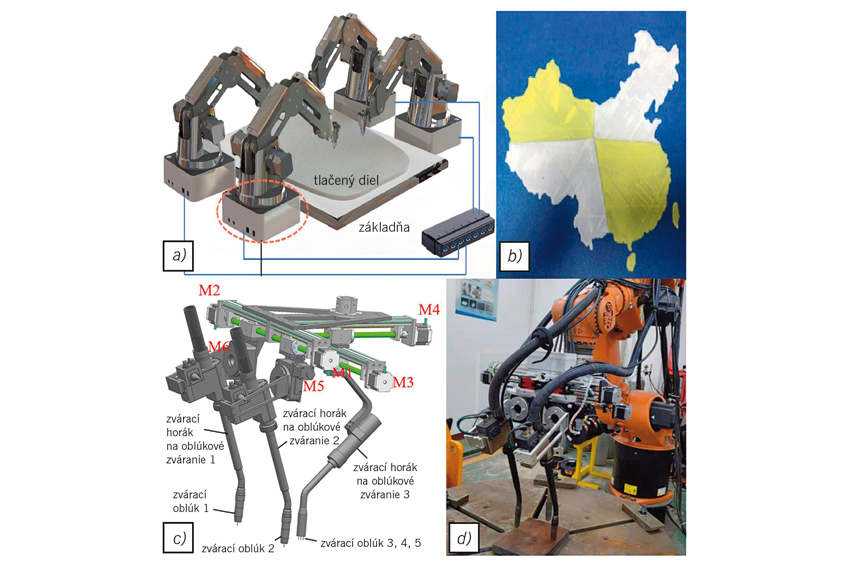
Využitie kooperatívnych robotických ramien pre AV rýchlo rastie, keďže na rozdiel od portálových systémov je každé robotické rameno nezávislé od ostatných ramien, čo ďalej zjednodušuje ovládanie a plánovanie kooperatívneho robotického systému. Okrem toho môže byť pracovný priestor robotických ramien väčší ako stroj. Príkladom môže byť systém, ktorý pozostáva zo štyroch trojosových robotických ramien, tlačového lôžka a dýzy pripojenej ku každému robotickému ramenu (obr. 3a).
Roboty sú usporiadané paralelne a každá linka môže mať toľko robotov, koľko je potrebné. Týmto spôsobom možno vytlačiť diel ľubovoľnej dĺžky. Šírka aj výška tlačenej časti sú však obmedzené pracovným priestorom robota. Preto je systém schopný tlačiť iba modely, ktoré sú veľké v jednom rozmere, ale menšie v ostatných dvoch rozmeroch. Obr. 3b zobrazuje diel vyrobený týmto kooperatívnym systémom, ktorý v porovnaní s jedným robotom umožňuje skrátiť čas výroby o 73 %. Jedným z obmedzení tejto práce je, že žiadnemu robotu nie je dovolené pracovať na ďalšej vrstve, pokiaľ ostatné roboty nedokončili prácu na aktuálnej vrstve.
Použitie kooperatívnych robotov umožňuje 3D tlač vo viacerých rozlíšeniach, čo pri strojoch s jedným robotom nie je možné, pokiaľ rameno často nemení koncový efektor. Systém, v ktorom dva roboty spolupracujú súčasne, skracuje čas tlače, ale komplikuje plánovanie v dôsledku pravdepodobnosti kolízie.
Robotické rameno môže niesť aj koncový akčný člen s viacerými spolupracujúcimi tlačovými hlavami. Príkladom môže byť koncový akčný člen pre metódu priamej depozície energie, ktorý zahŕňa päť rôznych oblúkov s tromi horákmi (obr. 3c). Okrem toho koncový akčný člen riadi polohu a rotáciu horákov pomocou piatich motorov a tiež šesťosové robotické rameno (obr. 3d). Tento systém bol použitý na výrobu kovového držiaka lodnej vrtule s účinnosťou tvárnenia dosahujúcou 1 800 cm3/h.
Kooperatívne tlačové mobilné roboty
Používanie mobilných robotov v AV je nový koncept. Schopnosť robota voľne sa pohybovať v pracovnom priestore otvára pre AV nové možnosti a predstavuje niekoľko výhod, napríklad veľký pracovný priestor, ktorý môžu mobilné roboty pokryť a ktorý je obmedzený len dĺžkou kábla alebo kapacitou batérie. Voľný pohyb v rovine spolu s veľkým pracovným priestorom uľahčuje úlohu vyhýbania sa kolíziám, čo je hlavnou prekážkou pri implementácii kooperatívnych robotov v AV. Okrem toho môže mobilný robot niesť robotické rameno, čo ďalej zvyšuje užitočnosť mobilných robotov a rozširuje možné aplikácie.
Kvalita vyrobených dielov pri aplikácii mobilných robotov je väčšinou horšia ako kvalita dielov vyrobených pevne umiestnenými robotmi. Na dosiahnutie porovnateľných výsledkov je potrebné vyvinúť lepšie lokalizačné systémy. Okrem toho sú kolesá mobilných robotov veľmi citlivé na výrobné a montážne chyby, ktoré vedú k vibráciám a nepresnostiam. Všesmerové kolesá navyše prinášajú vertikálne vibrácie, ktoré ďalej znižujú kvalitu tlačenej časti.
Veľkú popularitu medzi vedeckou a výskumnou komunitou majú lietajúce mobilné roboty ako základ systémov pre biologicky inšpirovaný koncept 3D tlače s rojom. Tento typ spolupráce je inšpirovaný prírodou, kde hmyz spolupracuje na stavbe veľkých štruktúr, ako sú napr. termitiská. Vzdušné roboty majú tú výhodu, že každý robot sa môže pohybovať v troch rozmeroch, čo im umožňuje ľahko sa vyhnúť kolíziám a dostať sa na neprístupné miesta. Jednou z už zrealizovaných koncepcií tohto typu je projekt s názvom BuilDrones. Aby sa podarilo vyriešiť nepresnosti leteckých robotov, je k dronu pripojený delta robot, ktorý vykonáva proces tlače. Delta robot je samonastaviteľný manipulátor, ktorý kompenzuje poruchy spôsobené dronom počas letu. Autori tohto projektu úspešne vytlačili niekoľko štruktúr pomocou tohto systému. Vo virtuálnom tlačovom experimente použili tri BuilDrone na kooperatívnu tlač veľkej štruktúry. Neuskutočnila sa však žiadna kooperatívna fyzická tlač a použitý senzorový systém bol navrhnutý tak, aby fungoval v laboratórnom prostredí, čo obmedzovalo jeho použitie vo vonkajšom prostredí. Okrem toho systém zobrazuje strednú hodnotu absolútnej chyby polohovania tlačovej hlavy 6 mm.
Letecké aj pozemné roboty čelia pri použití v AV aplikáciách niekoľkým výzvam, najmä pokiaľ ide o presnosť polohy, zásoby materiálu a energiu batérie. Súčasné pozemné mobilné roboty trpia zlou presnosťou určovania polohy a tento problém je ešte zosilnený pri leteckých robotoch, pretože aktuálna presnosť týchto systémov v izolácii je v rozsahu centimetrov. Tím BuilDrones prekonal tento problém namontovaním presného delta robota na dron. Ten však zvyšuje celkovú hmotnosť a bráni systému uniesť viac materiálu. Problémy s hmotnosťou sú závažné v prípade leteckých robotov, takže výskumníci sa zameriavajú na vývoj ľahkého materiálu špeciálne navrhnutého pre leteckú AV. Keďže robot nemôže prepravovať veľké množstvo materiálu, treba často dopĺňať zásoby, čo výrazne zvyšuje čas tlače. Dopĺňanie sa zvyčajne vykonáva manuálne, takže je potrebný vývoj automatizovaných stratégií dopĺňania materiálu pre pozemné aj vzdušné systémy AV. Tu je problém spotreby energie, pretože zariadenia pre AV zvyčajne vyžadujú vysoký výkon v porovnaní s používaním dronov.
Asistenčné robotické systémy
V kontexte AV môžu byť asistenčné roboty použité na zvýšenie všestrannosti strojov pre AV. Pomocné roboty sú tie, ktoré priamo neukladajú alebo nevytláčajú materiál počas výrobného procesu. Sú zodpovedné za úlohy, ktoré treba realizovať mimo tlače pri príprave alebo počas procesu tlače (napr. kontrola vyberania a umiestňovania alebo kontroly tlačovej platformy).
Pomocné roboty umiestnené mimo procesu tlače
Asistenčné roboty sú pre AV prínosom, keď sa používajú pred tlačou alebo potom. Takéto roboty sa používajú na prípravu stroja pre AV, vykonávanie úloh, ako je preprava a nakladanie materiálu do stroja, čistenie tlačovej platformy alebo vkladanie podpier mimo procesu tlače. Bežnou aplikáciou je aj preprava 3D tlačového stroja na požadované miesto pred začatím procesu tlače. V tomto prípade sú výhodné mobilné roboty, ktoré umožňujú prenosnosť stroja a výrazne zväčšujú pracovný priestor. Viaceré výskumné skupiny skúmali využitie mobilných robotov ako dopravných prostriedkov.
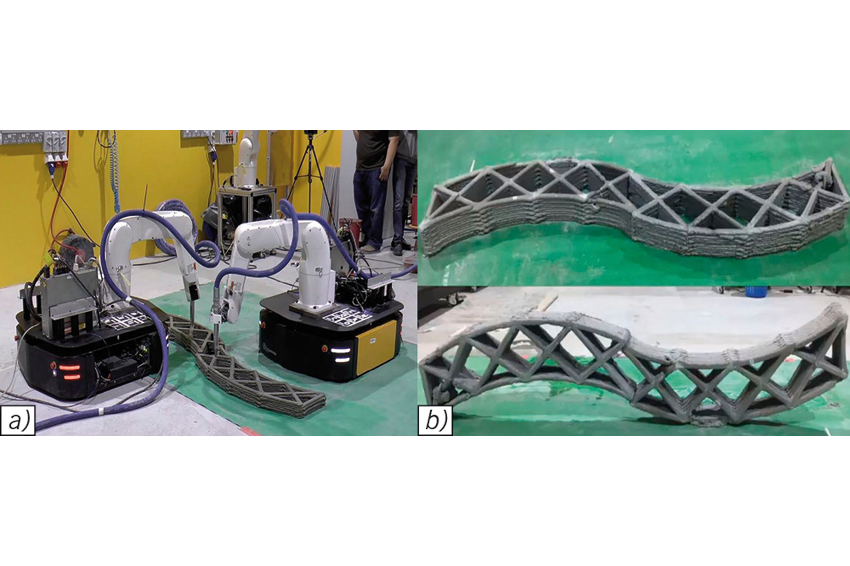
V rámci jednej z týchto výskumných iniciatív bol vyvinutý tím mobilných robotov pre stavebné aplikácie založený na šesťosových robotických ramenách namontovaných na mobilných robotoch (obr. 4a). Na lokalizáciu a odometriu mobilných platforiem boli použité viaceré snímače ako laserový skener, stereo kamera a značkovače, snímače kolies a inerciálne meracie jednotky. Mobilná platforma bola použitá na prenášanie robotického ramena na miesto tlače.
Stratégia presúvania počas tlače nebola implementovaná. Každý robot bol vybavený tlačovou dýzou, ktorá nanáša betón privádzaný z externého čerpadla a miešacieho systému. Vzor betónovej konštrukcie je znázornený na obr. 4b. Vzorka mala vysokú pevnosť spoja, čo jej umožnilo uniesť jej hmotnosť. Rozhranie medzi týmito dvoma časťami je však viditeľné, čo naznačuje, že treba vylepšiť systém určovania polohy. Keď je tlač dielu dokončená, stroj sa zvyčajne zastaví a nemôže pokračovať, kým sa diel neodstráni. Preto možno použiť asistenčné roboty na vybratie hotového dielu a jeho uloženie mimo priestoru tlače.
Pomocné roboty pri tlači
Dôležitou úlohou asistenčných robotov je vykonávanie rôznych úloh pri tlači, aby sa zvýšila všestrannosť strojov AV. Takto možno AV zakomponovať do kompletných výrobných a montážnych systémov. Asistenčné roboty umožňujú aktívne ovládanie tlačovej platformy, čím sa zvyšujú stupne voľnosti systému. Okrem toho možno ovládané tlačové platformy použiť na zjednodušenie procesu vytvárania rotačných dielov. Príkladom môže byť laserový systém usmerňovania energie, ktorý pozostáva zo šesťosového robotického ramena ako tlačiarne a dvojosového naklápacieho a rotačného robota na ovládanie platformy. Tento systém zjednodušuje procesné plánovanie tlače vo viacerých rovinách a znižuje potrebný čas tlače. Systém sa používal na výrobu otočných častí, ako sú vrtule, ktoré pri tradičnom spôsobe AV vyžadujú podporné konštrukcie. Hlavné obmedzenie tejto techniky súvisí s nekvalitnou povrchovou úpravou spôsobenou oxidáciou, ktorá vyžaduje následné spracovanie.
Ďalším príkladom aplikácie robotov v procese tlače sú operácie vyberania, umiestňovania a kontroly. Výskumníci z Georgia Institute of Technology (USA) vyvinuli stroj pre AV s názvom M4, ktorý kombinuje viacero technológií AV, ako je extrúzia materiálu, nástrek materiálov a vytvrdzovanie svetlom. Systém tiež obsahuje dve robotické ramená pre aplikácie typu zober a polož, konformnú tlač a meranie in-situ. Okrem toho systém využíva päť pohybových stupňov, jeden na ovládanie polohy lôžka v osiach X a Y a ďalšie štyri na ovládanie polohy Z každej tlačovej hlavy. Systém sa použil na výrobu LED diód tlačou puzdra pomocou extrúznych systémov a vložením požadovanej elektroniky do puzdra. Úlohy vkladania však nie sú plne automatizované a vykonáva ich operátor, ktorý musí umiestniť položku do špecifickej polohy a orientácie, aby robot mohol správne vybrať položku a umiestniť ju na správne miesto.
Záver
Aditívna výroba je zvyčajne realizovaná jedným robotom. Takéto systémy predstavujú rôzne obmedzenia, ako je napr. dlhý čas tlače. Koncept tímov robotov, ktorý sa už používa v iných výrobných procesoch, však možno rozšíriť aj na AV. Táto koncepcia odstraňuje niektoré zo súčasných obmedzení AV, zlepšuje všestrannosť a produktivitu systému a tiež umožňuje nové možnosti kombinácie rôznych spôsobov tlače s použitím viacerých tlačových hláv.
Tímy robotov v AV pozostávajú z kooperatívnych tlačových a pomocných robotov. V kooperatívnych tlačových systémoch je tlačová úloha rozdelená medzi tlačové hlavy v systéme, čo značne znižuje čas výroby. Na druhej strane asistenčné roboty nepomáhajú priamo v procese tlače, ale pri vykonávaní úloh, ktoré sú potrebné pred procesom tlače, počas neho alebo po ňom, ako je nakladanie a vykladanie stroja. Okrem plánovania trás a algoritmov na predchádzanie kolíziám sa pri kooperatívnej AV treba zaoberať aj charakteristikami materiálov, z ktorých sú diely tlačené. Na vyriešenie týchto problémov sa používajú rôzne techniky a algoritmy, z ktorých každý má svoje výhody a nevýhody.
Literatúra
[1] Alhijaily, A. – Kilic, Z. M. – Bartolo, A. N. P.: Teams of robots in additive manufacturing: a review. Virtual and Physical Prototyping. [online]. Publikované 23. 1. 2023.
[2] Shah, A.: Emerging trends in robotic aided additive manufacturing. Materialstoday, proceedings, 2022, vol. 62, part 13, p. 7231 – 7237.
[3] Romeo, J.: Additive Manufacturing and Robotics – the Bloom of a New Machine? Robotics 247. [online]. Publikované júl 2021.
-tog-
