





Spomedzi nepreberného množstva existujúcich definícií umelej inteligencie (UI) môžeme vybrať tú, ktorá hovorí, že ide o schopnosť digitálneho počítača alebo počítačom riadeného robota vykonávať úlohy bežne spájané s inteligentnými bytosťami. Tento pojem sa často používa pri vývoji systémov zahŕňajúcich intelektuálne procesy charakteristické pre človeka, ako je jeho schopnosť usudzovať, objavovať zmysel niečoho, zovšeobecňovať alebo učiť sa z minulých skúseností.
S určitými formami UI sa už (často nevedomky) stretávame pri používaní našich mobilov, obsluhe inteligentných (smart) systémov a zariadení, práci na internete a pod. Ide o aplikácie inteligentných algoritmov zamerané na pokročilé spracovanie dát, optimalizáciu procesov, inteligentné rozhodovanie a riadenie a pod., ktoré majú ďaleko predstavám tvorcov sci-fi žánru. Dosiahnutie tzv. nadľudskej inteligencie alebo superinteligencie je jedným z vedeckých snov ľudstva, ku ktorému súčasný výskum iba hľadá cesty [1]: emulácia činnosti ľudského mozgu, zdokonaľovanie činnosti biologických mozgov, tvorba rozhrania mozog – počítač, prechod od individuálnej ku kolektívnej (sieťovej) inteligencii či rozvoj samotného odvetvia UI, ktorý je v súčasnosti výrazne poháňaný najmä priemyslom a čelí dvom technologickým mega trendom – globálnemu prepojeniu sveta a dynamickému vývoju technológií UI. Všetky prístupy skôr či neskôr nastolia aj množstvo etických, právnych či ešte netušených typov problémov, s ktorými sa bude potrebné vyrovnať. Stretnúť sa možno s rôznymi koncepciami uvažujúcimi o možnostiach budúceho vývoja UI.
Najčastejšie sa skloňujú tri formy UI [2]:
- UI úzka alebo slabá (ANI – Artificial Narrow Intelligence): úzko špecializovaná na jedinú oblasť;
- UI všeobecná, silná alebo na ľudskej úrovni (AGI – Artificial General Intelligence, Strong AI, Human-Level AI): s počítačmi inteligentnými tak ako ľudia;
- umelá superinteligencia (ASI – Artificial Superintelligence): na základe definície Nicka Bostroma je oveľa múdrejšia ako najlepší ľudský mozog prakticky v každej oblasti vrátane vedeckej tvorivosti, všeobecnej múdrosti a sociálnych zručností.
Iná koncepcia hovorí o troch vlnách – vlne expertných systémov, vlne štatistického alebo strojového učenia a budúcej vlne spájajúcej predošlé dve s cieľom dosiahnuť kontextovú sofistikovanosť, abstrakciu a vysvetlenie. Najviditeľnejšou a médiami pravdepodobne najsledovanejšou oblasťou je vývoj prepojených a autonómnych vozidiel (Connected and Autonomous Vehicles – CAV), ktorý nám najlepšie nastavuje zrkadlo súčasného stavu a (ne)dokonalosti súčasnej úrovne UI. Samostatne jazdiace automatizované vozidlá sú odrazom druhej vlny v zmysle spomenutej koncepcie. Technológie nám zatiaľ slúžia na zdokonalenie našich fyzických a psychických daností – rýchlosť, presnosť, opakovateľnosť a pod., neexistuje však nič, čo by človek nevedel robiť a stroj áno. Absencia tzv. zdravého rozumu (Common sense) stále robí zo strojov iba našich pomocníkov a zanecháva nás na úrovni slabej UI. Už aj táto úroveň je však dostatočná na to, aby nám predostierala niektoré nepríjemné otázky a problémy, ktorých riešenie vyvolá vrásky odborníkov z viacerých oblastí.
Ako bude uvedené v ďalšom texte, vývoj CAV je toho najlepším dôkazom. Najviac problémov sa vynára v súvislosti s dosiahnutím požadovanej úrovne bezpečnosti vyvíjaných inteligentných technológií – bezpečnosti v zmysle obidvoch anglických výrazov safety aj security. Ide o oblasť, ktorej dlhodobo nebola venovaná primeraná bezpečnosť a s narastajúcou úrovňou zložitosti, konektivity a dostupného výpočtového výkonu je prítomná čoraz intenzívnejšie.
V súvislosti s rizikami implementácie prístupov UI sa odborná verejnosť delí na tri názorové prúdy zastávajúce nasledujúce stanoviská [5]:
- Techno-skeptici: „Nemali by sme sa báť, pretože v dohľadnej budúcnosti UI nedosiahne úrovne ľudí (najmenej stovky rokov).“
- Digitálni utopisti: „Nemali by sme sa báť – dôjde k tomu (možno čoskoro), ale je prakticky zaručené, že to bude dobrá vec (digitálny život je prirodzený a žiaduci ďalší krok v našom kozmickom vývoji).“
- Členovia hnutí hovoriacich o úžitku UI: „Záujem je opodstatnený a užitočný, pretože výskum a diskusia o bezpečnosti UI teraz zvyšuje šance na dobrý výsledok (cieľom by malo byť vytvorenie užitočnej inteligencie).“
Akademické kruhy sú takisto rozdelené – jeden názor predstavuje UI ako existenčnú hrozbu pre ľudstvo, prínosy by však mali prevážiť náklady; druhý názor kladie do centra pozornosti otázky spravodlivosti, zodpovednosti a transparentnosti vývoja UI. Na čom sa však odborníci na bezpečnosť už teraz vedia rámcovo zhodnúť, je skutočnosť, že preukázať bezpečnosť technológií obsahujúcich UI bude veľmi zložitý problém, čo vyplýva zo samotnej jej podstaty. Štandardne by bolo napr. potrebné poskytnúť presnú, úplnú a jednoznačnú špecifikáciu funkčného správania technického systému, čo sa pri predstave zakomponovania napr. stále sa učiacich (a teda nepretržite sa vyvíjajúcich) technológií dá len ťažko predstaviť. Navyše pri posudzovaní bezpečnostného dosahu UI treba mať na pamäti možnosť jej zneužitia a/alebo jej nedokonalosti. V druhom prípade môže byť cieľ UI ušľachtilý, vzhľadom na nedokonalosť však môžu byť metódy zvolené na jeho dosiahnutie devastačné. Stačí si predstaviť riešenie environmentálnych problémov Zeme, kde by najefektívnejším spôsobom pre UI bolo „odstránenie ľudstva“ ako najväčšieho pôvodcu znečistenia a ekologických problémov. Ukazuje sa, že Asimovove zákony nie sú pre bezpečnú koexistenciu človeka s inteligentnými strojmi dostatočné a do popredia sa skôr dostávajú princípy iniciatívy [3], ktoré sú o to naliehavejšie, o čo sú jednotlivé výskumné oblasti rozdrobenejšie a neschopné vzájomnej spolupráce a integrácie.
Automatizácia CAV
Automatizácia prepojených a/alebo autonómnych vozidiel (CAV) je oblasťou, kde sa automobilový priemysel snaží nasadzovať najnovšie technologické riešenia vrátane implementácie metód a algoritmov UI. Riešenia smerujú okrem samotného výrobného procesu k zvýšeniu úrovne asistencie a/alebo automatizácie počas vedenia vozidiel, ich prepojiteľnosti vrátane využívania služieb cloudových platforiem, k vývoju nových aplikácií pre oblasť poisťovníctva a likvidácie škodových udalostí, sledovaniu vitálnych funkcií vodiča a/alebo ďalších členov osádky a pod. Z hľadiska procesu vedenia vozidla a jeho automatizácie vstupujú do procesu riadenia tri primárne faktory – vodič, systém riadenia vozidla a ďalšie systémy a komponenty vozidla, ktoré pri uvažovaní prostredia realizujú úlohu dynamického riadenia (obr. 1).
| automatizácia | vodič | monitoring | |
| 0 | iba vodič | pohľad upretý na cestu, ruky na volante | monitorované riadenie |
| 1 | vodič s pomocou | ||
| 2 | ruky dočasne mimo volantu | ||
| 3 | podmienená automatizácia | nemonitorované riadenie | |
| 4 | vysoká automatizácia | pohľad mimo cesty, ruky mimo volantu | |
|
5 |
plná automatizácia | ||
Tab. 1 Úrovne automatizácie riadenia vozidla podľa [4]
Všeobecne akceptovaný dokument [4] zadefinoval päť úrovní automatizácie (tab. 1), pričom na trhu už sú k dispozícii úrovne 0 až 3, vyššie stupne sú v procese testovania. Kategorizácia je založená na posúdení:
- či systém automatizácie riadenia vozidla realizuje podúlohy bočného a pozdĺžneho pohybu v úlohe dynamického riadenia,
- či systém automatizácie riadenia vozidla realizuje podúlohy bočného a pozdĺžneho pohybu v úlohe dynamického riadenia súčasne,
- či systém automatizácie riadenia vozidla tiež realizuje podúlohu detekcie a reakcie na objekty a udalosti,
- či systém automatizácie riadenia vozidla tiež realizuje odovzdanie úlohy dynamického riadenia,
- či je systém automatizácie riadenia vozidla limitovaný návrhom operačného prostredia.
V úrovni 0 má vodič výhradnú kontrolu nad svojím vozidlom, aj keď môžu existovať systémy aktívnej podpory (napr. parkovacie senzory, tempomat na udržiavanie rýchlosti). Úroveň 1 obsahuje asistenčné systémy umožňujúce vozidlu čiastočne reagovať na podnety z okolia (napr. adaptívny tempomat či systém na udržiavanie vozidla v jazdnom pruhu). Realizujú sa podúlohy bočného alebo pozdĺžneho riadenia, nie však obidve súčasne (príklad: 2018 Honda Civic). Úroveň 2 využíva prepojenie technológií prvej úrovne, vďaka čomu je vozidlo schopné na obmedzený čas prebrať úplnú kontrolu nad rýchlosťou a riadením, pri riešení problémov sú však zásahy vodiča nevyhnutné (príklad: 2018 Tesla Model S). V úrovni 3 je vozidlo schopné pri zadaní trasy nahradiť vodiča, v prípade problémov však musí dôjsť k okamžitému odovzdaniu riadenia naspäť vodičovi, čo je hlavná slabina a nebezpečný aspekt tohto konceptu (príklad: 2019 Audi 8). V úrovni 4 sa vyžaduje zásah vodiča iba v kritických situáciách, zväčša po predošlom automatizovanom zastavení (príklad: Hyundai NEXO – v rámci testovania). Všetky úrovne 1 až 4 sa odohrávajú v obmedzenom operačnom prostredí. Najvyššia úroveň 5 zodpovedá plne autonómnemu vozidlu, ktoré sa pohybuje v ľubovoľnom prostredí a nepredpokladá zásahy vodiča (preto v princípe nemusia ani existovať ovládacie prvky – volant, pedále a pod.). Jej dosiahnutie predpokladá zvládnutie troch základných prekážok – videnie, vnímanie (vrátane porozumenia videného) a konanie.
Vzhľadom na nedokonalosť senzorov musia byť využívané viaceré detekčné princípy, ktorých výstupy sa prekrývajú a dopĺňajú. Snímané dáta musia byť správne interpretované s cieľom v reálnom čase detegovať stacionárne aj pohyblivé objekty v danom prostredí. Zohľadňovať sa musia dopravné podmienky, výskyt chodcov, poveternostné podmienky, stav vozovky, komunikácia s ostatnými subjektmi (V2X) atď. Najťažšou úlohou je prijímať bezpečné rozhodnutia, čo vyžaduje otestovať a vyhodnotiť miliardy možných aj nepravdepodobných scenárov.
V rámci jednotlivých podúloh úlohy dynamického riadenia možno identifikovať rôzne prístupy – od klasických (nevyužívajúcich metódy UI) cez prístupy opierajúce sa o implementáciu UI algoritmov až po kombináciu obidvoch prístupov.
Problémy bezpečnosti CAV
Legislatívny rámec
Naliehavé výzvy prichádzajúce s digitalizáciou nášho životného priestoru nevynechávajú ani automobilový priemysel. V snahe napomôcť rozvoju autonómnej mobility prijala Európska komisia (EK) stratégiu [5], ktorá vytvára rámec pre ďalší vývoj v zmysle vyššie uvedených skutočností. Okrem funkčnej a technickej bezpečnosti (safety) sa do popredia dostávajú aj otázky bezpečnosti fyzickej, informačnej, kybernetickej (security).
Požiadavky na funkčnú bezpečnosť cestných vozidiel sa definujú v zmysle ISO 26262 – Functional Safety for Road Vehicles, ktorá vychádza zo všeobecne známej IEC 61508 a predstavuje jej aplikáciu v oblasti automotive aplikácií s vysokou integritou. Znamená to, že musia byť stanovené dodatočné požiadavky na vývojový proces. Okrem rozsiahleho a systematického overovania, validácie a testovania s príslušnou dokumentáciou o každom kroku vývojového procesu musia inžinieri preukázať celkovú zhodu s normou pomocou dokumentu opisujúceho, ako každý krok v životnom cykle vývoja spĺňa príslušné požiadavky normy. Takisto treba preukázať, že nástroje použité na vývoj sú pre dané úlohy vhodné. Norma definuje funkčnú bezpečnosť ako „neprítomnosť neprimeraného rizika v dôsledku nebezpečenstva spôsobeného nesprávnym správaním elektrických alebo elektronických systémov“. Možno ju aplikovať na SW alebo HW komponenty alebo ich kombináciu. Pracuje s „automobilovými úrovňami integrity bezpečnosti“ (Automotive Safety Integrity Level – ASIL), ktoré možno jednoducho vyjadriť ako súčin:
ASIL = závažnosť × (expozícia × riaditeľnosť) (1)
kde:
- závažnosť (Severity): vážnosť alebo intenzita poškodenia alebo následkov s ohľadom na život ľudí v prípade porušenia bezpečnostných cieľov (S1 – slabé a stredné zranenia, S2 – vážne zranenia a zranenia ohrozujúce život, S3 – zranenia vedúce k úmrtiu);
- expozícia (Exposure): kvantifikácia možnosti, že sa vozidlo ocitne v nebezpečnej alebo rizikovej situácii, ktorá môže spôsobiť škody na zdraví ľudí a majetku (E1 – veľmi malá pravdepodobnosť, E2 – malá pravdepodobnosť, E3 – stredná pravdepodobnosť, E4 – vysoká pravdepodobnosť);
- riaditeľnosť (Controllability): rozsah, v rámci ktorého je vodič schopný zvládnuť (riadiť) vozidlo, ak dôjde k porušeniu bezpečnostného cieľa v dôsledku zlyhania alebo nesprávneho fungovania akéhokoľvek vyhodnocovaného komponentu vozidla (C1 < C2 < C3, kde C1 je ľahká riaditeľnosť a C3 je obťažná riaditeľnosť).
Výsledkom sú štyri úrovne A, B, C, D priradené na základe alokačnej tabuľky (tab. 2 – priložená vo fotogalérii). Kombinácia S3, E4 a C3 reprezentuje vysoko nebezpečnú situáciu, naopak S1, E1 a C1 zodpovedá najnižšej úrovni integrity bezpečnosti, ktorá hovorí, že prípadné zlyhanie komponentu nie je nebezpečné, a teda nevyžaduje žiadne dodatočné opatrenia v zmysle ISO 26262. V tabuľke je označená ako úroveň QM (Quality Management Level). Ako typické príklady jednotlivých úrovní možno uviesť napr. zlyhanie rádia (QM), zlyhanie obidvoch zadných alebo obidvoch brzdových svetiel (ASIL-A), zlyhanie obidvoch predných svetiel alebo neplatné údaje zo zadnej kamery (ASIL-B), mimovoľné brzdenie (ASIL-C), nechcená akcelerácia (ASIL-C až D), ovládanie volantu alebo nežiaduce plné brzdenie ABS, neúmyselná aktivácia airbagov (ASIL-D). Približné vyjadrenie vzťahu úrovní ASIL a úrovní integrity bezpečnosti definované inými normami je v tab. 3.
| aplikačná doména | úrovne integrity bezpečnosti | ||||
|
automotive (ISO 26262) |
Qm | ASIL-A | ASIL-B | ASIL-C | ASIL-D |
| všeobecné (STN EN 61508) | – | SIL-1 | SIL-2 | SIL-3 | SIL-4 |
| letectvo (ED-12/DO-178/DO-254) | DAL-E | DAL-D | DAL-C | DAL-B | DAL-A |
| železnica (STN EN 50126/50128/50129) | – | SIL-1 | SIL-2 | SIL-3 | SIL-4 |
Tab. 3 Približné porovnanie úrovní integrity bezpečnosti v rôznych aplikačných oblastiach
Pretože ide o kvalitatívny koncept, úrovne ASIL majú skôr informatívny charakter – ich klasifikácia závisí do značnej miery od kontextu a interpretácie. Na kvantifikáciu bezpečnostných požiadaviek používa ISO 26262 rôzne metriky – Failures in Time (FIT), Single Point Fault Metric (SPFM), Latent Fault Metric (LFM). Do budúcna možno očakávať redefiníciu parametra „riaditeľnosti“, pretože súčasná definícia hovorí o ľudskom vodičovi a jeho neprítomnosť by znamenala v autonómnych vozidlách automaticky úroveň C3 (extrém „neriaditeľnosti“). Zvyšné dva parametre zostanú s najvyššou pravdepodobnosťou bez zmeny. ISO 26262 poskytuje požiadavky na činnosti a metódy, ktoré by bolo potrebné zobrať do úvahy v procese dosahovania funkčnej bezpečnosti, nepredstavuje však návod na to, ako by tieto požiadavky mali byť splnené. Informácie o ďalších dokumentoch súvisiacich s relevantnou štandardizáciou (pohľad U.S. DoT k 08/2018) možno nájsť napr. v [6].
Zlyhanie automobilových komponentov, ktoré neplnia alebo plnia viac alebo menej závažné bezpečnostné ciele, môže byť spôsobené aj externými vplyvmi – či už zamýšľanými, alebo náhodnými. Problematika kybernetickej bezpečnosti v súvislosti s CAV sa dostáva do popredia s nárastom nových hrozieb kybernetických útokov vyplývajúcich z prepojiteľnosti vozidiel a systémovej integrácie tisícok komponentov [5]. Podľa [7] bude 75 % z celkového počtu 92 mil. automobilov celosvetovo predaných v roku 2020 pripojených na internet. V súčasnosti neexistuje odvetvový prístup k ochrane vozidla pred kybernetickými útokmi. Preto EK prijala v roku 2017 balík opatrení v oblasti kybernetickej bezpečnosti [8], uverejnila usmernenia týkajúce sa bezpečnostnej a certifikačnej politiky potrebné na bezpečnú a dôveryhodnú komunikáciu správ súvisiacich s bezpečnosťou cestnej premávky a riadením dopravy medzi vozidlami a infraštruktúrou [9] a uznesením A8-0036/18/P8_TA-PROV(2018)0063 ju Európsky parlament zaviazal zverejniť legislatívny návrh na zabezpečenie rovnakých podmienok na prístup k palubným údajom a zdrojom, ktoré majú obrovský potenciál na vytváranie nových a personalizovaných služieb a výrobkov (pomoc, poistenie, oprava, prenájom, represia a pod.). V zámorí bol iniciovaný a neskôr reiniciovaný obdobný proces (tzv. Security and Privacy in Your Car (SPY) Car Act of 2015, 2017), ktorý zatiaľ viedol k publikovaniu návodov [10] a osvedčených postupov [11] pre aplikácie v Spojených štátoch.
V rámci vytváraného legislatívneho a štandardizačného procesu však existujú viaceré základné dilemy [7], predovšetkým:
- kto je (bude) vlastníkom dát zbieraných z vozidla?
- ide o osobné dáta?
- kto zodpovedá za ich bezpečnosť?
- komu k nim umožniť prístup?
- aká je úloha štandardov a relevantných organizácií?
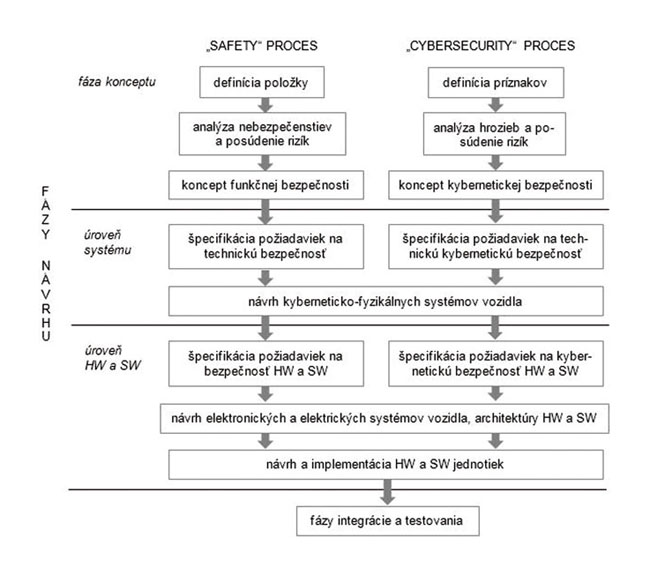
Funkčná a prevádzková bezpečnosť prepojených a autonómnych vozidiel je predmetom dlhodobého výskumu. Zložité kyberneticko-fyzikálne systémy v ňom (okrem fyzickej infraštruktúry a fyzických vozidlových systémov) začínajú hrať čoraz dôležitejšiu úlohu. Z hľadiska vývojového procesu nie je kybernetická bezpečnosť iba jedným komponentom navyše, musí byť integrálnou súčasťou fázy plánovania, od samotného konceptu cez výrobu, prevádzku a údržbu až po vyradenie systému z činnosti, ako je zjednodušene naznačené na obr. 2 [12]. Oblasť kybernetickej bezpečnosti riadi najmä ISO 21434, problematiku ochrany údajov ISO 27001 a mnohé ďalšie.
Prečo by mal rásť náš záujem o bezpečnosť?
Dostupné štatistiky jednoznačne preukazujú prudký nárast bezpečnostných incidentov. Podľa [13] v prvom kvartáli 2019 bolo identifikovaných 51 incidentov, čo je v porovnaní s rovnakým obdobím minulého roku (15 incidentov) viac ako 300 % nárast (za celé obdobie 2018 išlo o 66 incidentov). Berúc do úvahy posledný prieskum spoločnosti Cisco, existuje analógia s viac ako 350 % celoročným nárastom ďalšieho javu v kybernetickom priestore známeho ako ransomware. V niektorých prípadoch bol cieľom tohto typu útoku už aj automobilový sektor. V rámci rozdelenia hackerov na etických (tzv. white hat) a „zlých“ (tzv. black hat) v prvom štvrťroku 2019 narástol ich percentuálny pomer z 45/55 na 28/72 v prospech black hat hackerov, čo je dôkazom rastúcej miery rizika. Prehľad cieľov najčastejších vektorov útoku je v tab. 4.
| systém bezkľúčového vstupu | 47 % |
| servery | 17 % |
| mobilné aplikácie | 6 % |
| zbernica CAN (Controller Area Bus) | 4 % |
| ECU (Engine Control Unit) | 4 % |
| Infotainment (informačno-zábavný systém) | 4 % |
| port OBD (On-board Diagnostics) | 4 % |
| Bluetooth | 2 % |
Tab. 4 Najčastejšie vektory útoku v 1. kvartáli 2019 [13]
Štatistické údaje z rovnakého zdroja hovoriace o motivácii útokov uvádzajú snahu o odcudzenie vozidla (40 %), narušenie/poškodenie aktivít súvisiacich s podnikaním a poskytovaním služieb (17 %), získanie kontroly nad vozidlom (14 %), porušenie údajov (10 %) či snahu o realizáciu podvodných aktivít (5 %).
Predikcie na rok 2019 nie sú o nič optimistickejšie [14]:
- s každou novou službou nový vektor útoku,
- narušeniu ochrany osobných údajov výmenou/zdieľaním vozidiel,
- nárast a zdokonaľovanie hackerských útokov na autonómne senzory,
- nárast počtu podvodov a zneužitia v oblasti smart mobility,
- nárast útokov na bezkľúčový vstup do vozidla,
- potenciálna možnosť útoku na celú flotilu vozidiel.
Hrozby v oblasti kybernetickej bezpečnosti v ostatných rokoch výrazne menia svoj charakter [16]:
- zmena motivácie útočníka – motivácia môže byť rôznorodá (ideologické dôvody, snaha ukázať prevahu, nespokojnosť, donútenie, náhoda, osobné uspokojenie, závislosť, zvedavosť, finančný profit apod.); principiálne dochádza k posunu od jednotlivca poháňaného motívom zvedavosti k útokom dobre financovaných a vyškolených útočníkov v rámci kybernetickej vojny alebo sofistikovaných aktivít kriminálnych organizácií;
- nárast rýchlosti a šírky záberu útokov – od ručného nájdenia slabého miesta softvéru na konkrétnom počítači sa prechádza k automatizovanému vyhľadávaniu slabých miest, ich šíreniu cez internet a globálnemu ovplyvňovaniu všetkých pripojených zariadení;
- podstatný nárast potenciálneho dosahu narušenia – globálne prepojenie zariadení a ľudí znamená, že útoky neovplyvnia iba digitálny svet (ako v minulosti), ale tiež fyzický svet prostredníctvom internetu vecí a sveta spoločnosti cez všadeprítomné platformy sociálnych médií.
Literatúra
[1] BOSTROM, N.: Superintelligence. Paths, Dangers, Strategies. Oxford University Press 2014. ISBN 978-0-19-967811-2.
[2] URBAN, T.: The AI Revolution: The Road to superintelligence. Wait But Why? [online]. Dostupné na: https://waitbutwhy.com/2015/01/artificial-intelligence-revolution-1.html.
[3] Asilomar AI Principles. [online]. Dostupné na: https://futureoflife.org/ai-principles/?submitted=1#confirmation.
[4] SAE J3016TM Levels of Driving Automation. SAE International, 2018.
[5] COM (2018) 283 final: Na ceste k automatizovanej mobilite: stratégia EÚ pre mobilitu budúcnosti. Oznámenie komisie Európskemu parlamentu, Rade, Európskemu hospodárskemu a sociálnemu výboru, výboru regiónov, 2018.
[6] Preparing for the future of transportation. Automated vehicles 3.0. U. S. Department of Transportation, October 2018.
[7] The state of security regulation in the connected car ecosystem. Challenges, dilemmas and stakeholders’ interests. E-book, Upstream Security Ltd. 2018.
[8] Digital Single Market. Policy. Cybersecurity. EK, 2018. Dostupné na: https://ec.europa.eu/digital-single-market/en/cyber-security.
[9] Intelligent Transport Systems: Cooperative, connected and automated mobility (CCAM). EK 2019. Dostupné na: https://ec.europa.eu/transport/themes/its/c-its_en.
[10] Accelerating the Next Revolution in Roadway Safety. Federal Automated Vehicles Policy. NHTSA, Septembre 2016.
[11] Cybersecurity best practices for modern vehicles. Report No. DOT HS 812 333, NHTSA, October 2016.
[12] TOKODY, D. et al.: Safety and security through the design of autonomous intelligent vehicle systems and intelligent infrastructure in the smart city. Interdisciplinary Description of Complex Systems, 16(3-A), 384-396, 2018.
[13] Q1 2019 sees rapid growth of automotive cyber incidents. Upstream Security Ltd. 2019
[14] Upstream security global automotive cybersecurity report 2019. Research into smart mobility cyber attacks trends. Upstream Security Ltd. 2019.
[15] GOLDBERG, J.: Traditional IT Cyber Security vs. Automotive Cyber Security Explained. Guard Knox, March 2018.
[16] Artificial Intelligence and Machine Learning Applied to Cybersecurity. The results of an intensive three-day IEEE Confluence. IEEE, 6-8 October 2017.
[17] KARAHASANOVIC, A.: Automotive Cyber Security. Threat modelling of the AUTOSAR standard. MSc. thesis, Chalmers University of Technology, Gothenburg 2016.
[18] Self-driving Safety Report. NVIDIA Report 2018.
[19] WATNEY, C. – DRAFFIN, C.: Addressing New Challenges in Automotive Security. R Street Policy Study, No. 118, Nov. 2017.
[20] APRUZZESE, G. et al.: On the Effectiveness of Machine and Deep Learning for Cyber Security. 10th Int. Conference on Cyber Conflict (CyCon), IEEE 2018.
[21] APRUZZESE, G. et al.: On the Effectiveness of Machine and Deep Learning for Cyber Security. 10th Int. Conference on Cyber Conflict (CyCon), IEEE 2018.
[22] PANIMALAR, A. S. et al.: Artificial Intelligence Techniques for Cyber Security. In: International Research Journal of Engineering and Technology (IRJET), 2018, Vol. 5, Iss. 3.
[23] GREGOR, M. – JANOTA, A. – HRUBOŠ, M.: Kompendium vybraných metód umelej inteligencie 1. VŠ učebnica, Žilinská univerzita v Žiline, 2018. 211 s.
[24] CHOCKALINGAM, S. et al.: Bayesian Network Models in Cyber Security: A Systematic Reviews. Proc. of the Nordic Conference on Secure IT Systems (Nordic 2017), TU Delft, 2017.
prof. Ing. Aleš Janota, PhD., Eur
Ingales.janota@fel.uniza.sk
Ing. Roman Michalík
roman.michalik@fel.uniza.sk
Žilinská univerzita
Fakulta elektrotechniky a informačných technológií
Katedra riadiacich a informačných systémov
Univerzitná 1, 010 26 Žilina
Tel.: +421 41 513 3356
