






Integrácia pokročilých technológií
Z hľadiska minimalizovania nákladov a ekonomickej efektívnosti je pre malé a stredné podniky nevhodné využívať robotické pracoviská navrhnuté na masovú výrobu, napríklad pre automobilový priemysel. Klasické robotické pracoviská aj s vyššou adaptabilitou, napríklad prispôsobenie spájania typu spájaného materiálu, sa však nevyznačujú adaptabilitou na zmenu geometrie výrobkov ani možnosťou polohovať obrobky vo všetkých šiestich stupňoch voľnosti. Napríklad práve v automobilovom priemysle sú obrobky určené na zváranie pripnuté vo fixných prípravkoch a nie je umožnená ich dodatočná adaptabilita, čo sa týka polohy s cieľom zvýšenia konzistencie a kvality zvaru. Takisto tu platí, že nemožno ľubovoľne meniť obrobky, pretože k nim treba pripraviť statické prípravky, napríklad polohovadlá alebo úpinky. Množina obrobkov je teda obmedzená vzhľadom na fixné prípravky a na predurčené pozície obrobkov. Predurčené pozície pred výrobným procesom treba zabezpečiť ešte v predprípravnej fáze, čím sa opäť znižuje efektivita a ekonomická návratnosť výrobného procesu.
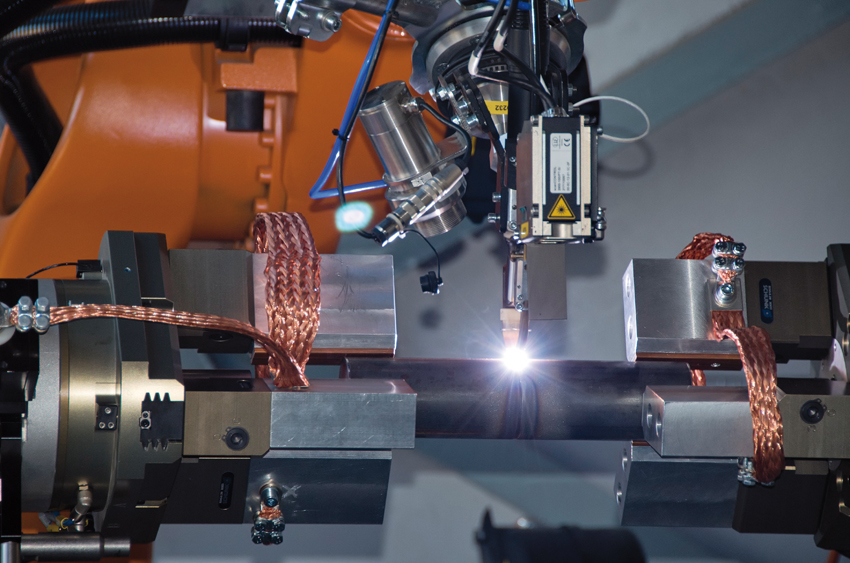
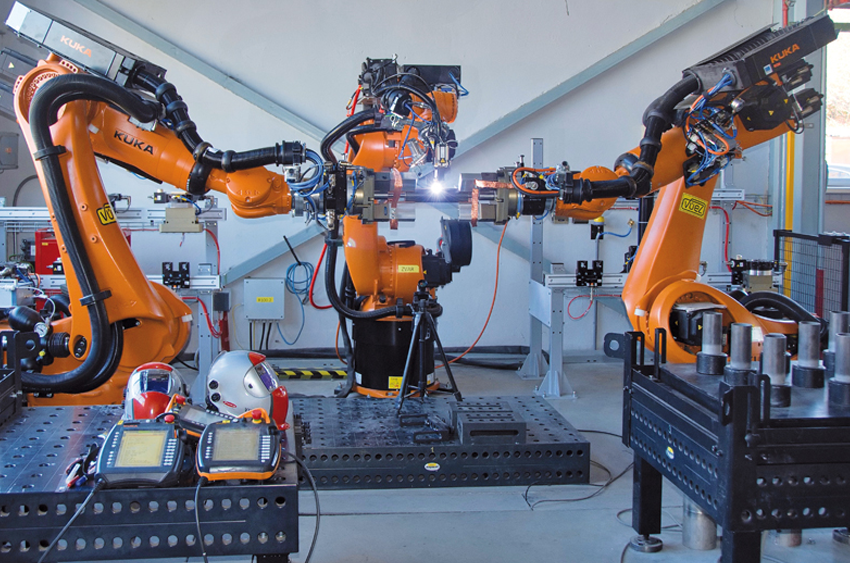
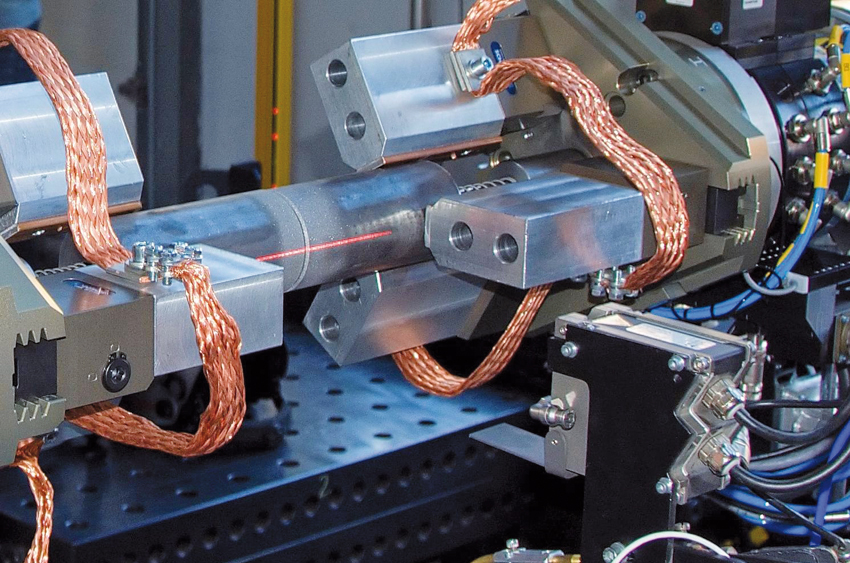
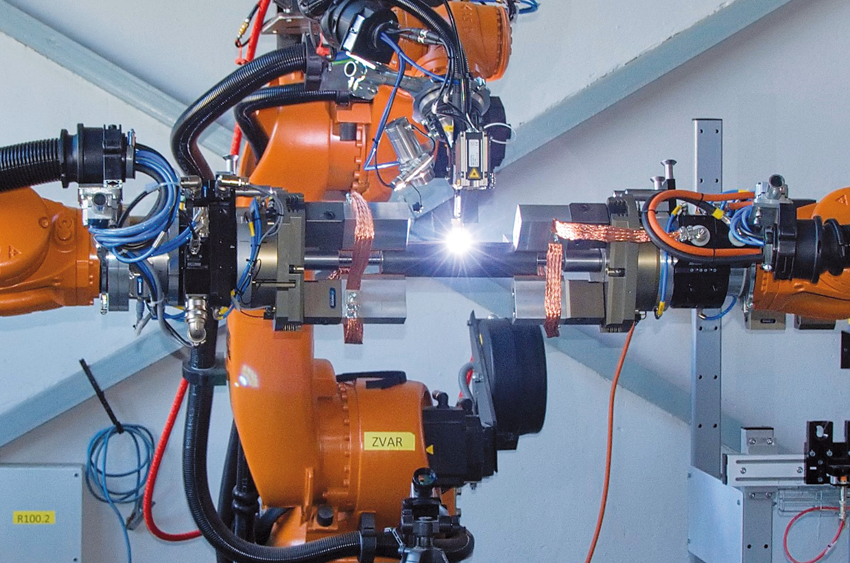
Podstata technického riešenia IZVAR spočíva v tom, že obsahuje skupinu kooperujúcich robotov pozostávajúcu z dvoch šesťosových polohovacích robotických manipulátorov umiestnených proti sebe vrátane jedného jednoosového externého polohovadla. To je uložené osovo súmerne medzi nimi. Robotický systém na manipuláciu spájaných súčastí disponuje trinástimi stupňami voľnosti pohybu. Skupina robotov obsahuje aj jeden šesťosový spájací robot, ktorý je umiestnený v 90° uhle proti prvému a druhému robotickému manipulátoru. Prvý robotický manipulátor, druhý robotický manipulátor, externé polohovadlo a spájací robot sú vzájomne komunikačne prepojené a koordinované centrálnym riadiacim systémom, ku ktorému sú pripojené: systém automatizovaného robotického odoberania voľne uložených súčastí z prvého a druhého skladu súčastí a automatizovaný systém korekcie polôh robotických manipulátorov.
V prípravnej etape výroby treba do skladu výrobkov pripraviť palety s výrobnými súčasťami, z ktorých bude výrobok pozostávať. Následne bude operátorom pomocou HMI systému zvolený typ požadovaného výrobku z dostupnej databázy výrobkov. Po uvedení pracoviska do režimu automatizovanej výroby, keď už nie je do pracovného priestoru povolený vstup operátorovi, sa začína samotná automatizovaná výroba.
Robotický gravírovací systém
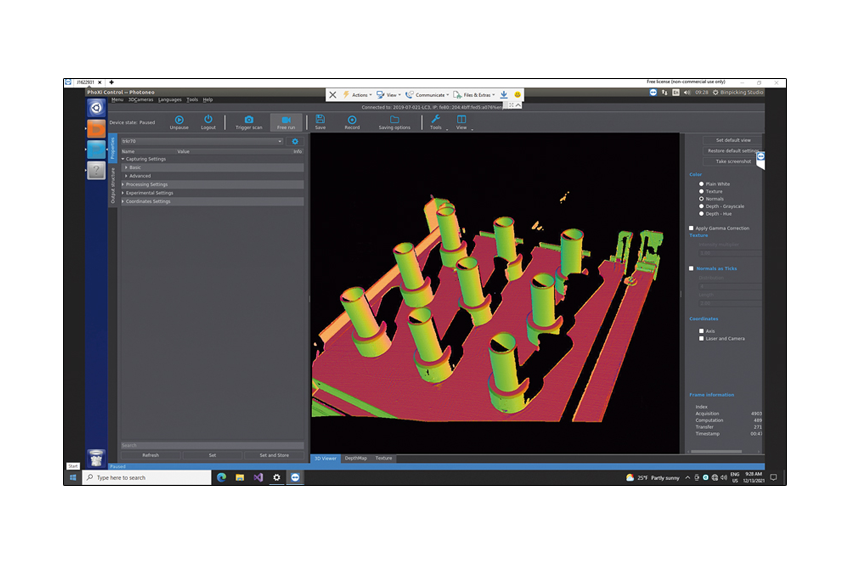
Robotický gravírovací systém je súčasťou rýchlovýmenného systému robotických chápadiel. Realizovaný je gravírovacím zariadením s nastaviteľnými otáčkami, do ktorého je upnutý potrebný gravírovací nástroj. Na zistenie aktuálnej pozície hrotu nástroja voči povrchu obrobku je využitý 2D laserový skener inštalovaný v blízkosti gravírovacej hlavice.
Gravírovanie zahŕňa tri kroky:
- zachytenie 3D mračna bodov,
- exekúcia merania s laserovým snímačom,
- exekúcia programu gravírovania.
Navrhnutý proces je unikátny tým, že umožňuje gravírovať neznáme objekty umiestnené do pracovného priestoru robota.
Systém inteligentnej robotickej ultrazvukovej diagnostiky
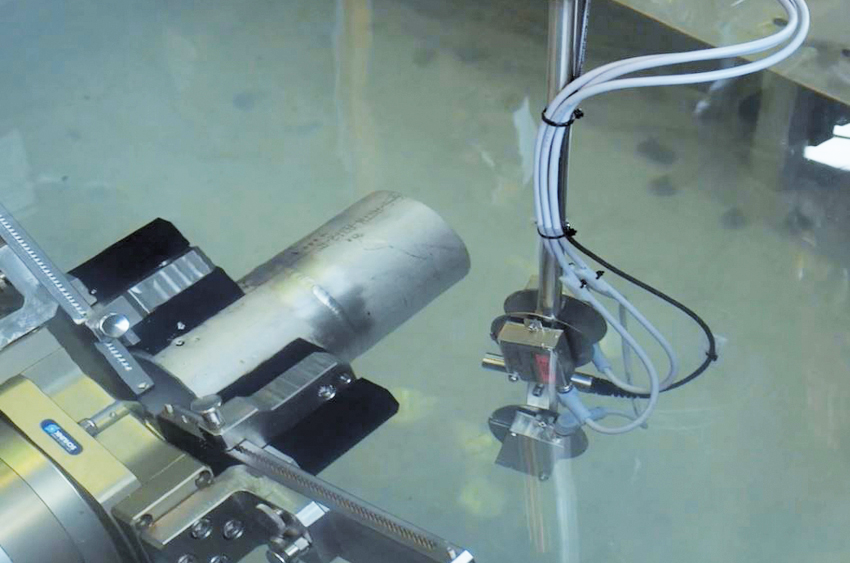
Hlavnou funkciou technického riešenia systému inteligentnej robotickej ultrazvukovej diagnostiky je efektívna a plynulá automatizovaná robotická ultrazvuková diagnostika klasifikovaných objektov pri splnení požiadavky automatickej adaptácie technického riešenia na ich tvarovú a rozmerovú premenlivosť. Klasifikované objekty sú zo skladu vstupných objektov roboticky polohované a v závislosti od ich tvaru počas diagnostického procesu aj držané v kvapalnom prostredí diagnostickej nádrže subsystémom robotického polohovania diagnostikovaného objektu. Optimálne polohovanie ultrazvukovej sondy proti snímanému objektu vykonáva subsystém automatizovaného spätnoväzbového riadenia vzdialenosti roboticky polohovanej ultrazvukovej sondy v kvapalnom prostredí, a to na základe údajov z troch laserových snímačov vzdialenosti. Na základe výstupných údajov zo subsystému automatizovanej identifikácie defektov sú diagnostikované objekty automaticky roztriedené na kvalitné a nekvalitné.
Systém inteligentnej robotickej ultrazvukovej diagnostiky sa môže vo všeobecnosti využiť v automatizovaných diagnostických procesoch, ktorých cieľom je hľadanie vnútorných defektov základných materiálov výrobkov, ako aj defektov v ich spojoch. Technické riešenie sa dá aplikovať aj pri úlohách automatizovanej klasifikácie vnútorných anomálií objektov a pri robotickom meraní hrúbky stien diagnostikovaných objektov.
Obojsmerná spolupráca
Aj keď ÚRK a Národné centrum robotiky už spolupracovali počas svojej existencie s viacerými komerčnými subjektmi z praxe, predsa len VÚEZ je v niečom výnimočný. „Často sa na nás firmy obracajú s tým, aby sme niečo vyrobili, dodali, ale my nie sme výrobná ani inžinierska firma. Potrebujeme na druhej strane partnera, ktorý sa bude aktívne podieľať na riešení a takto to bolo aj v prípade VÚEZ. Na začiatku boli ľudia v obave, čo to s nimi plánujeme robiť, ale postupom času sme dospeli do stavu, keď sa už my začíname veľa užitočných vecí učiť od nich,“ hovorí F. Duchoň. Spolupráca medzi ÚRK a VÚEZ nie je len jednosmerná. „Zuzana Kovaríková je momentálne našou externou doktorandkou a to je dôkaz, že VÚEZ rozumie tomu, že potrebuje svojich pracovníkov vzdelávať, o to viac si túto spoluprácu vážime,“ konštatuje F. Duchoň.
Na druhej strane VÚEZ vysoko oceňuje snahu ÚRK a Národného centra robotiky o vzdelávanie odborníkov v oblasti robotiky. „Je skvelé spolupracovať s takými kompetentnými a skúsenými partnermi, ako je ÚRK a Národné centrum robotiky. Okrem podieľania sa na príprave prototypov nás posunuli aj v spomínanej oblasti vzdelávania. Ako veľa ľudí z praxe, aj my sme mali radi svoj komfort bez výraznejšej potreby zvyšovať svoju kompetenciu v tom, čo sme robili. No prístup ľudí z týchto dvoch subjektov nás naštartoval k zmene tohto myslenia, čím sme sa aj ako VÚEZ posunuli na novú úroveň v oblasti know-how a rozšírili sme aj svoje trhové a obchodné možnosti,“ konštatuje na margo spolupráce Z. Kovaríková. Pritom nebolo výnimkou, že pracovníci z ÚRK boli často osobne prítomní aj v samotnej výrobnej prevádzke v Tlmačoch a takýmto spôsobom sa podieľali na vývoji a testovaní riešenia.
Pokročilé riešenie určené pre zákazníkov z rôznych oblastí
Záujmom spoločnosti VÚEZ je, aby sa investície vložené do projektu IZVAR postupom času vrátili, a preto majú s jeho nasadením plány aj za hranicami vlastného podniku. Pritom nemusí ísť o nasadenie kompletného pracoviska IZVAR, ale svoje praktické využitie ako samostatné pracoviská majú aj jeho jednotlivé časti. „Po zvládnutí tohto projektu sme schopní ponúknuť zákazníkom návrh, simuláciu, vývoj a integráciu podobných robotických pracovísk, a to presne podľa konkrétnych požiadaviek. Máme za sebou viaceré významné referencie v oblasti nasadzovania automatizovaných riešení a po doplnení know-how a praktických skúseností s robotikou tak dokážeme ponúkať komplexné riešenia,“ konštatuje Z. Kovaríková. Dôkazom, že o IZVAR bude záujem, svedčí fakt, že VÚEZ už navštívilo niekoľko potenciálnych zákazníkov s cieľom nielen oboznámiť sa s pracoviskom IZVAR, ale rovno aj otestovať jeho možnosti pri zváraní nimi donesených výrobkov.
Ak by zváranie vo VÚEZ naďalej prebiehalo len ručne, časom by podnik došiel k hranici dostupnosti zváračov alebo technologických možností ručného zvárania. „Vďaka projektu IZVAR má podnik vo svojich rukách eso a je len na ňom, ako rozdané karty využije,“ dopĺňa F. Duchoň.
Ďalší potenciál na zlepšenie v rámci projektu IZVAR je podľa Z. Kovaríkovej v optimalizácii parametrov zváracieho procesu prioritne s cieľom dosiahnutia vyššej kvality zvarov a v druhom kroku aj optimalizácie cyklového času výroby jednotlivých výrobkov. „Optimalizácia prestavenia času pracoviska, zadávanie výrobných požiadaviek prioritne cez HMI a webové rozhrania v digitálnej forme, rozširovanie databázy výrobkov nielen podľa potrieb VÚEZ, ale aj dopytov zákazníkov – to sú výzvy, ktoré nás čakajú v najbližšom období.“
Na robotický systém na adaptívne spájanie súčastí (IZVAR) aj na systém inteligentnej robotickej ultrazvukovej diagnostiky (IDIAG) už vydal Úrad priemyselného vlastníctva SR osvedčenie o zápise úžitkového vzoru.
Ďalšia zastávka – umelá inteligencia!
A čo má VÚEZ pripravené na najbližšie obdobie? Už minulý mesiac sa začal realizovať projekt digitalizácie procesu zvárania (DIROZ), na ktorom bude opäť participovať aj ÚRK a Národné centrum robotiky. Cieľom projektu bude vyvinúť riadiaci systém využívajúci umelú inteligenciu, konkrétne strojové učenie na optimalizáciu robotickej manipulácie a robotického zvárania. „V praxi sme sa stretli s tým, že v mnohých prevádzkach sú k dispozícii pomerne rozsiahle a zmysluplné údaje, avšak súvislosti medzi nimi sa využívali len zriedkavo a v obmedzenom rozsahu. To nás viedlo k rozhodnutiu zamerať sa na oblasť umelej inteligencie a v najbližších rokoch ju rozvíjať do konkrétnych riešení,“ predstavuje plány VÚEZ Z. Kovaríková. Na zozname plánov je aj maximalizácia automatizácie a digitalizácie údržby robotického pracoviska či implementácia rozhrania človek – robot.
„Strojové učenie bude hrať z hľadiska hodnotenia kvality zvaru mimoriadne dôležitú úlohu, pretože tento proces generuje veľké množstvá údajov, ktoré človek nedokáže efektívne vyhodnotiť a analyzovať, a to ani pomocou bežných SW nástrojov. Tie údaje generujú zvárací systém, laserový skener, silovo-momentové riadenie, riadiaci systém robotov, termovízna kamera a pod. Chceme k tomu pridať aj spektrálnu analýzu zvaru pomocou multispektrálnej kamery v reálnom čase, s čím sme sa tiež ešte nestretli v žiadnom inom riešení, ale vidíme v tom zmysel,“ dodáva na záver F. Duchoň.
VÚEZ má tiež plány aj vo svojom tradične silnom odvetví – energetike, kde sa uchádza o APVV projekt zameraný na bezpečnostné systémy jadrových elektrární. „Práve tu by sa v najbližšom období mohli prelínať naše klasické riešenia a know-how s modernými technológiami, ako je napr. mobilná robotika, umelá inteligencia či automatizované vyhodnocovanie rozsiahlych údajov,“ uzatvára naše stretnutie Z. Kovaríková.

